加速/刹车/底盘/能耗 深度试驾理想L9

●智能辅助驾驶
关于理想AD Max智能驾驶辅助系统,我表示认可,因为它是第一个让我连续使用自动驾驶功能超过10分钟的车型,确切地说,我在100公里的高速全程都在一直使用它,而且还是在下雨天,中途竟然没有因为车辆误操作而被打断。

如果想拥有真正智能的驾驶,那么硬件方面的水准一定要非常高才行。作为理想AD Max智能驾驶系统的大脑,双英伟达Orin-X芯片将提供508TOPS的总算力,相比2021款理想ONE采用的双地平线征程3芯片(总算力10TOPS)有了大幅提升。

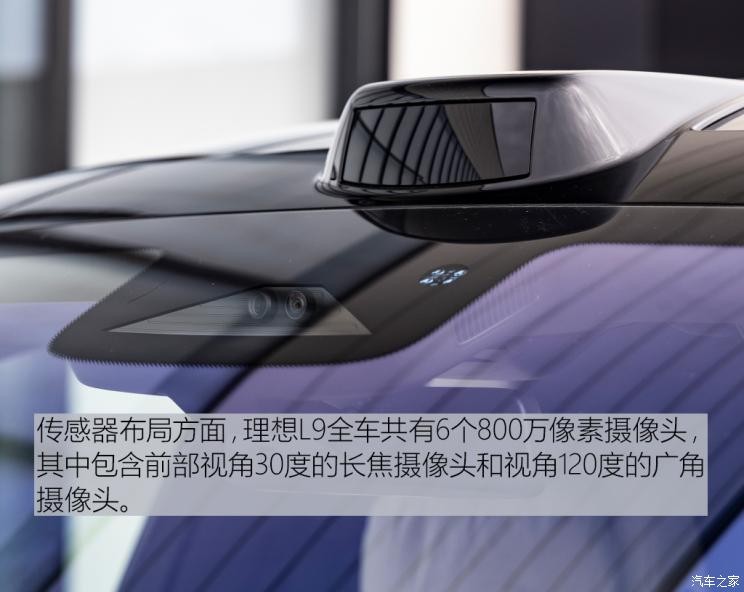
传感器布局方面,理想L9拥有6颗800万像素的摄像头,其中包含前部视角30°的长焦摄像头和120°的广角摄像头。两侧后视镜和翼子板处的摄像头用于感知周围车辆。同时理想L9上面还拥有5颗200万像素摄像头,其中4颗用于实现360°全景影像,后风挡顶部的另外1颗负责识别后方来车。


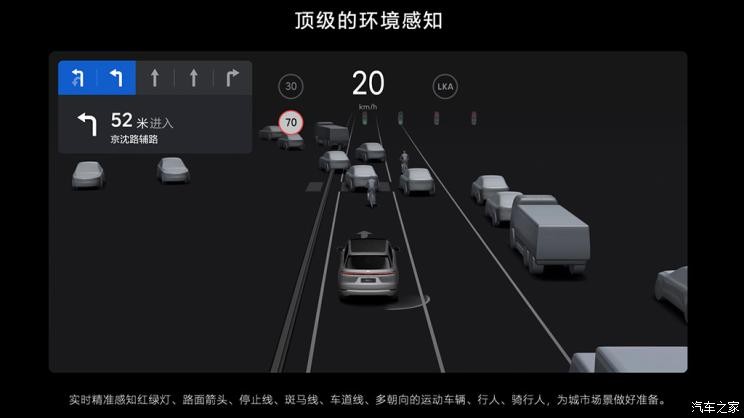
相比2021款理想ONE,更依赖于视觉传感器的理想L9仅保留了前向毫米波雷达,取消了四个角毫米波雷达。车顶突出的是一颗禾赛AT128长距离半固态激光雷达,主要用于收集施工路段或事故车等突发状况的数据,并在开启NOA自动导航驾驶辅助时,帮助车辆执行紧急避险动作。以上硬件再加上高德高清地图的数据信息,能够确保理想L9拥有现阶段顶级的环境感知能力,同时也让理想AD Max达到了现有智能驾驶第一梯队的水准。

自动驾驶好不好用,其实除了超强的硬件,软件算法也相当重要。理想L9同样是采用了全栈自研的智能驾驶算法,能够在确保安全的前提下,最大限度确保加减速的舒适性。比如在面对突然有车并线加塞的情况,它会根据该车的车速和动态进行综合判断,减速效果尽量做到和人操作一样的平顺,而不是简单的一脚重刹、吓人一跳。

另外它在变道动机和时机方面,也经过了更加人性化的考量。例如它并不喜欢待在最右侧的慢车道,而是更喜欢去车流速度更快的车道。一旦它发现该车道前方有慢车行驶,它会及时选择变道超车。其中从右往左变道超车会更加坚决果断,从左往右变道超车则需要判断更长的时间,因为要确保右侧车道前方没有慢车阻挡,避免无效变道,更符合常规逻辑。


实际驾驶过程中,我发现这套算法的确比较符合大多数国内的用车场景,在本次100公里的高速行驶过程中几乎没有出现过错误,仅有两次变道时被后方快速驶来的车辆闪灯,并迫使对方降速。毕竟即使是800万像素的摄像头,也无法做到像驾驶员的眼睛那样,对后方高速来车做出最及时准确的判断。如果是在德国的不限速高速公路上,类似这种变道就很容易发生危险。

值得一提的是,理想L9在车身前后均增加了蓝色辅助驾驶状态灯,自动泊车等场景下会点亮,以提醒其它交通参与者:该车辆正处于“自动驾驶”状态。

另外,理想L9装备了新一代电容方向盘,加入振动反馈之余,握力传感器对驾驶员手部的监测也更加精确。不会因为系统检测不到你的双手是否有握方向盘,而被迫退出自动驾驶。